|
|
Introduction
Guiding astronomical images is a delicate and important task for any astrophotographer. One of the fundamental requirements of a good deep-sky image is the accurate tracking, leading to pinpoint and round stars. While good tracking is possible even with an obsolete camera, a good quality camera will surely provide a more reliable and accurate tracking. The image quality of a guiding camera has been much neglected, but I stress that this is fundamental to obtain a good estimate of the star centroid. Typical 8 bit camera fail to get an accurate centroid, 12 and 16 bit cameras are by far better.
This page derived from a survey the author conducted during Fall 2010 for his selection of a new guiding camera, better suited to his new setup requirements. All the opinions here below are personal views of the author and may be changed as boundary conditions change. Please adapt the comments to your actual requirements.
My older guiding cameras
September 1998, Colle del Nivolet, Italian Alps, 2530m height. This was the first time for me under a truly dark sky, where I cannot even find the simplest constellations, due to the huge multitude of stars! Unfortunately I needed to manually guide all my long exposures and unfortunately I've had limited views of the wonderful sky above. Back home I've immediately ordered a SBIG ST4 guide camera, that remained my main guiding camera for nearly 12 years! I've used both as a stand-alone guider during the film era, and connected to a PC when I switched to digital imaging. I've even used it for imaging, both deep sky and planets, and I've learned the fundamental bases of digital preprocessing. Although ST4 was doing its guiding work well, I felt it was time for an up-to-date camera. The drawbacks of ST4 are many: extremely small sensor (192x164 pixel, a mere 0.03 megapixel !!!), big pixel dimensions (13.75x16 micrometers), small dynamic range (8 bit) and low pc connection (RS-232) causing full frame download times of about 6 s.
I've tested also other guiding solutions. My 2nd choice after the ST4 is a webcam, a Philips Vesta Pro modified with a black and white sensor, providing decent sensitivity and resolution. But the lack of direct guider output make this solution quite uncomfortable, with the need of a relais box (many more cables!) or PC connection to the telescope.
The drawback of all the cameras I've used before 2010 is the need to center a suitable guide star in the chip field of view (FoV), an operation that can be quite demanding in the cold nights in the trips on the mountains. I've experimented solutions with flip mirrors and finders, but the are only a partial help.
Guiding astronomical images is a delicate and important task for any astrophotographer. One of the fundamental requirements of a good deep-sky image is the accurate tracking, leading to pinpoint and round stars. While good tracking is possible even with an obsolete camera, a good quality camera will surely provide a more reliable and accurate tracking. The image quality of a guiding camera has been much neglected, but I stress that this is fundamental to obtain a good estimate of the star centroid. Typical 8 bit camera fail to get an accurate centroid, 12 and 16 bit cameras are by far better.
This page derived from a survey the author conducted during Fall 2010 for his selection of a new guiding camera, better suited to his new setup requirements. All the opinions here below are personal views of the author and may be changed as boundary conditions change. Please adapt the comments to your actual requirements.
My older guiding cameras
September 1998, Colle del Nivolet, Italian Alps, 2530m height. This was the first time for me under a truly dark sky, where I cannot even find the simplest constellations, due to the huge multitude of stars! Unfortunately I needed to manually guide all my long exposures and unfortunately I've had limited views of the wonderful sky above. Back home I've immediately ordered a SBIG ST4 guide camera, that remained my main guiding camera for nearly 12 years! I've used both as a stand-alone guider during the film era, and connected to a PC when I switched to digital imaging. I've even used it for imaging, both deep sky and planets, and I've learned the fundamental bases of digital preprocessing. Although ST4 was doing its guiding work well, I felt it was time for an up-to-date camera. The drawbacks of ST4 are many: extremely small sensor (192x164 pixel, a mere 0.03 megapixel !!!), big pixel dimensions (13.75x16 micrometers), small dynamic range (8 bit) and low pc connection (RS-232) causing full frame download times of about 6 s.
I've tested also other guiding solutions. My 2nd choice after the ST4 is a webcam, a Philips Vesta Pro modified with a black and white sensor, providing decent sensitivity and resolution. But the lack of direct guider output make this solution quite uncomfortable, with the need of a relais box (many more cables!) or PC connection to the telescope.
The drawback of all the cameras I've used before 2010 is the need to center a suitable guide star in the chip field of view (FoV), an operation that can be quite demanding in the cold nights in the trips on the mountains. I've experimented solutions with flip mirrors and finders, but the are only a partial help.
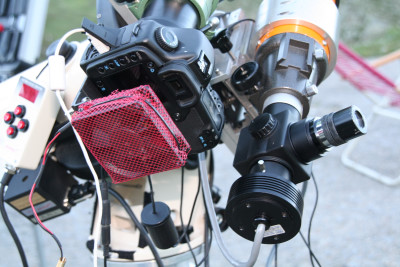
My older setup with at right the ST4 guider head at the focus of an 80/400 guidescope with flip mirror; at left my Canon Eos 5D, with a cooling fan, at the focus of a Pentax75 apo refractor.
My new
camera!
During Fall 2010, I really needed a new guiding camera able to minimize the search of the guide star and to improve the guiding accuracy. Solutions involve both a better sensor sensitivity and a larger number of pixel. Both of those characteristics increase the probability that a suitable guide star is presend inside the FoV. After a market survey, better summarized in the table below, I've selected my new camera: a Starlight Xpress Lodestar. At a first look, many characteristics are impressive: first this is really a light and small camera: only 50 g! The first light under the stars confirmed what I've been told: the sensitivity is really great! Also other characteristics are really interesting: only two cables, a single USB for both power and pc control, and a 5 wire cable to be connected to the telescope guiding port (RJ11, ST4 compatible). The camera nose is not present so that it can be focused also in very inner focal planes; moreover the external diameter of the camera is 31.8 mm and so the camera can be inserted inside a focuser. On the other hand the absence of a mechanical stop will need a refocusing at every dismounting from the focuser: this can be solved with a custom stop ring.
The impressive camera sensitivity will really allow guiding on faint stars, and the 16 bit dynamic range will provide with accurate centroid determination even on faint stars. In a test I've conducted I've not noticed any worseing of the centroid determination with stars with a min-max ADU difference from 30000 down to 600, corresponding to SNR of about 500 down to 25. This way I get a standard deviation of better than 1/10 pix.
The camera is also very fast, a full frame is downloaded in a so short time that I cannot measure it, maybe the correct value is about less than 0.3 s. I've been able to get a display visualization up to 2.5 fps. This is very helpful while focusing or centering the stars.
A little drawback of this camera is the interlaced sensor. The sensor area is read first at the even rows and then at the odd rows, so that if the stars in the image plane move during reading, an interlaced pattern becomes visible. This is most prominent with short exposures of 1 s or less, exactly what is used during guiding. This is even more noticeable when the seeing is not perfect, and so the star moves fast in the focal plane. During my first image sessions I've experienced noticeable interlacing defects in about 1% to 5% of the downloaded images. Even if the visual aspect of interlaced stars is really bad (looking at 400 or 800%), fortunately guiding seems not to be much affected.
During Fall 2010, I really needed a new guiding camera able to minimize the search of the guide star and to improve the guiding accuracy. Solutions involve both a better sensor sensitivity and a larger number of pixel. Both of those characteristics increase the probability that a suitable guide star is presend inside the FoV. After a market survey, better summarized in the table below, I've selected my new camera: a Starlight Xpress Lodestar. At a first look, many characteristics are impressive: first this is really a light and small camera: only 50 g! The first light under the stars confirmed what I've been told: the sensitivity is really great! Also other characteristics are really interesting: only two cables, a single USB for both power and pc control, and a 5 wire cable to be connected to the telescope guiding port (RJ11, ST4 compatible). The camera nose is not present so that it can be focused also in very inner focal planes; moreover the external diameter of the camera is 31.8 mm and so the camera can be inserted inside a focuser. On the other hand the absence of a mechanical stop will need a refocusing at every dismounting from the focuser: this can be solved with a custom stop ring.
The impressive camera sensitivity will really allow guiding on faint stars, and the 16 bit dynamic range will provide with accurate centroid determination even on faint stars. In a test I've conducted I've not noticed any worseing of the centroid determination with stars with a min-max ADU difference from 30000 down to 600, corresponding to SNR of about 500 down to 25. This way I get a standard deviation of better than 1/10 pix.
The camera is also very fast, a full frame is downloaded in a so short time that I cannot measure it, maybe the correct value is about less than 0.3 s. I've been able to get a display visualization up to 2.5 fps. This is very helpful while focusing or centering the stars.
A little drawback of this camera is the interlaced sensor. The sensor area is read first at the even rows and then at the odd rows, so that if the stars in the image plane move during reading, an interlaced pattern becomes visible. This is most prominent with short exposures of 1 s or less, exactly what is used during guiding. This is even more noticeable when the seeing is not perfect, and so the star moves fast in the focal plane. During my first image sessions I've experienced noticeable interlacing defects in about 1% to 5% of the downloaded images. Even if the visual aspect of interlaced stars is really bad (looking at 400 or 800%), fortunately guiding seems not to be much affected.


My new setup with the Lodestar at the focus of an 80/400 guidescope with XY finder.
List of
guiding cameras characteristics
To understand the table below, a few characteristics of guide cameras are here explained.
To understand the table below, a few characteristics of guide cameras are here explained.
- Sensor, BW or color: both the best resolution and sensitivity is obtained with BW sensors, so color sensors should be avoided.
- Pixel number: the larger
is the number of pixels, the higher the probability that a suitable
guide star is present in the FoV (e.g. in Magzero MZ-5m, with 1.3
Mpix).
Be aware that the most important
factor is the total number of pixel (usually expressed in megapixel)
and not the true dimensions (or area) in millimeters. Pixel number
being equal, a larger pixel dimension will need a longer focal length,
and so the FoV to get the same image scale will be exactly the same.
- Pixel dimension: the smaller the pixel, the smaller guiding errors will be detected. But a small pixel is also synonymous of low sensitivity. A good compromize is in the range from 5 to 10 micrometers.
- Pixel aspect ratio: while in the imaging field a square pixel is highly desirable, in a guiding camera this is not fundamental.
- Focal of the guidescope to get a
certain image scale: a high quality image is obtained with
guiding cameras with at least 12 bit; with those cameras a good
tracking is obtained when the guider image scale is less than 5 times
the main imager image scale. Bad quality cameras will require even a
1:1 image scale, thus reducing the FoV. An example: on my 20 cm
Newtonian, with a
1260 mm focal length, and a Canon EOS 5D camera at the prime focus, I
get an image scale of 1.34"/pix. Thus a minimum guiding image scale is
6.7"/pix. The table below shows the focal of the guidescope to get a
5"/pix image scale with each of the listed cameras. With Lodestar I get
a minimum focal of 342 mm, so my 80/400 guidescope is largerly
sufficient, yelding a 4.3"/pix image scale, about 3 times the main
imager scale, and so less than the 5 times advisable limit. Be aware
that this limit should be
considered with a little elasticity; with very small FWHM and
very bright stars, also 10x or even 15x can be usable, as shown by many
astrophotographers using the E-finder from SBIG. An improvement is also
multi stars guiding, allowing for a better centroid determination by
averaging many star positions. Unfortunately, in 2010, this feature is
provided by a few guiding softwares, and not in a native working.
- Bit: the analog to digital converter (ADC) is a fundamental electronic component to convert the gathered light/electrons into a digital signal. 8 bit is a limited value, allowing only 256 gray levels and implying a low SNR, thus with larger centroid errors. Optimal values ranges from 12 to 16 (or more).
- Stand alone: in the
digital era many astrophotographers have a PC under the stars. But
understandably some
prefer to leave their notebook at home, so a stand alone guider is a
must. Under the drawbacks consider also the more difficult focusing,
tracking monitoring and, more important, the problem debugging! In
fact, if a problem arises during the imaging session, without a PC the
debugging will be more difficult: e.g. guiding on a double star, a
galaxy or comet core, etc. Moreover only recently stand alone guiders
capable of dither guiding
appeared on the market (e.g. LVI SG2), an essential tecnique to get
high quality deep-sky images.
- Pulse time: all PC
softwares and the majority of stand alone guiders compute the time of
the correction to be imparted to the mount to correct the observed
error. Unfortunately some do not (e.g. LVI SG and SG2), and always
impart a fixed correction time, leading to systematically over or under
correction.
- PC connection and download time:
nowadays
the
most
widespread
PC
connection
is
USB2,
producing a
theoretical fast download. Unfortunately not all cameras are able to
internally read the image in short times (e.g. FLI ME2, 9 s), or some
cameras use the old RS232 (serial) connection. Some cameras, while
having a PC connection, cannot be controlled by PC, being the
connection only used to update the internal firmware (e.g. SkyWatcher
SynGuider).
- Hardware subframe: the
slowest cameras, as cited above, have slow download times of the full
frame image toward the PC. But this is not a problem when guiding and
using only a small part of the image (named subframe, typically 32x32
pixel), except if the camera is not capable of an hardware subframe. In
this case the full image is transferred to the pc and then the software
crops it, leading to very slow working (e.g. Starlight Xpress old HX516
with USB1 conversion, 6 s when used at 1x1 binning). On the contrary,
for some fast cameras, the absence of this feature is not a problem
because of the very fast full frame download (e.g. Starlight Xpress
Lodestar, <0.3 s).
- Maxim connection: being Diffraction Limited Maxim DL/CCD software one of the most widespread software for both imaging and guiding, the avaiability of drivers is important to connect the both cameras in the same software and to syncronize the main camera with the guider, e.g. for dithering.
- Image quality: while the
presence of image defects and low sensitivity is not a fundamental
problem with guiding camera, this will lead to more inaccurate and less
reliable guiding. Image defects include horizontal and/or vertical
lines/patterns; other defects include hot pixels, that in some
camera/sensors are very prominent (e.g. in Magzero MZ-5m). When using a
simple guiding software this can lead to huge problems. As an example,
consider a guiding star with a nearby hot pixel, and suppose that the
star brightness decreases below the hot pixel intensity (or on the
contrary the hot pixel intensity increase due to increasing internal
temperature): this will lead the guiding software to oscillate from one
position to another, giving unreliable guiding. I'd like to stress
again that image quality must not be neglected when selecting a guiding
camera.
- Relais output: many guiding cameras have built-in relais output to directly "talk" with the mount. This is both a comfortable feature (leading to less cumbersome cabling) and an important feature when you need to impart fast corrections. The most widely used connector is the "phone" style 6 pin RJ11 jack, ST4-compatible, available on the vast majority of modern mounts.
- Additional box: some cameras have two (or more) parts, a guider head and a control box. This can be useful both to decrease the head mass and not to have to push buttons on the head (for stand alone guiders), but the drawback is a more cumbersome cabling.
- Power supply: some cameras merge the power supply with the USB cabling (e.g. Starlight Xpress Lodestar), thus reducing cabling complexity. On the other side this can lead to cable length problems, solvable only with high-quality USB cables and with powered USB hubs. Some other cameras have external power supply, mainly when more than 2.5 W (USB limit) is needed to cool the sensor with Peltier stages. Be aware also to the power consumption, usually referred to a voltage of 12 V, that can lead to the need of very big batteries.
- Cooling: while this is an important feature on the main imaging camera, this is optional on guiding cameras. But if cooling is not present, be careful to select a sensor with a few hot pixel.
- Back focus: this is the distance from the mechanical stop and the sensor focal plane. For some particular optical compositions a small back focus is required to focus the camera. Some cameras can even have a negative back focus (e.g. Starlight Xpress Lodestar) because they can be inserted inside the focuser tube.
- Mass of head: to reduce any flexure problems between the guidescope and the main scope, and between the guidescope and its focuser, a light guider head is higly desirable. Optimal values are less than 250 g, and some cameras excel with extremely low mass (e.g. Starlight Xpress Lodestar, only 50 g).
- Price: this is always a
fundamental parameter! In the '90s a good guider was really expensive,
i.e. about 1300€ for a SBIG ST4; nowadays prices range mainly in the
200-500€. Being the prices relatively limited, I advise not to make a
selection only based on price, performances and features are really
important and a litte more expensive camera should be a really wise
investiment.
All the data in a table
Disclaimer: this table include many guiders as of Fall 2010. The data was found by internet search, articles, friends and personal experience. The comments reflect the author personal opinion. Many more cameras should be included, nevertheless the table is quite huge anyway. Please write me for any correction!
| Firm | Model | Sensor | Col? | Pix X | Pix Y | Dim Pix X | Dim Pix Y | Dim X | Dim Y | Focal for 5"/pix [1] | Total pix | Merit [3] | Bit | Stnd alone? | Compute pulse time? [5] | PC conn? | Dwnld time | Maxim ? | Image SNR quality [6] | Mark 1 to 5 | Ref [2] | Relais out? | Where ? |
Has additional box? | Power
supply
needed ? |
Cons. at 12V | Cooled ? |
Subfrm hw? [4] | Back focus |
Mass of head | Price new Italy 2010 | Price used Astrosell (Italy) |
Notes | Link |
| Unit | pix | pix |
um | um | mm | mm | mm | Mpix | s | A | mm | q | € | € | ||||||||||||||||||||
| SBIG |
ST4 | TC211 | bn | 192 | 164 | 13.75 | 16 | 2.6 | 2.6 | 613 | 0.03 | 0.3 | 8 | YES | YES | RS232 | 6 | YES | very bad | 1 | 1 | 15 pin | box | yes | YES | 1 | YES | YES | 1.0 | 200 | - | 250 | SBIG | |
| STV | TC237 | bn | 656 | 480 | 7.4 | 7.4 | 4.9 | 3.6 | 305 | 0.31 | 10 | YES | YES | RS232 | ? | YES | ? | RJ11 | box | yes | YES | 2 | YES | ? | 400 | - | SBIG |
|||||||
| SG4 | KAI340 | bn | 640 | 480 | 7.4 | 7.4 | 4.7 | 3.6 | 305 | 0.31 | 16 | YES
[7] |
YES | RS232 | 15 | NO ? | ? | RJ11 | head | no | YES | 0.2 | NO | ? | 580 | 1050 | 650 | [7] | SBIG |
|||||
| ST 402 ME | KAF402ME | bn | 765 | 510 | 9 | 9 | 6.9 | 4.6 | 371 | 0.39 | 156.1 | 16 | NO | - | USB2 | 0.5 | YES | very good | 5 | 4 | RJ11 | head | no | YES | ? | YES | np | 17.5 | 600 | 2060 | SBIG |
|||
| LVI |
SG | MT9V032 | bn | 752 | 480 | 6 | 6 | 4.5 | 2.9 | 247 | 0.36 | 8 | YES | NO, 250ms |
- | - | - | - | RJ11 | box | yes | YES | 0.1 | NO | - | 110 | 360 | 240 | LVI |
|||||
| SG2 | MT9V032 | bn | 752 | 480 | 6 | 6 | 4.5 | 2.9 | 247 | 0.36 | 8 | YES | NO, 30-500ms |
- | - | - | - | RJ11 | box | yes 2 | YES | 0.12 | NO | - | 110 | 450 | dslr control [8] |
LVI |
||||||
| Lacerta | MGEN | ICX279AL | bn? | 752 | 582 | 4.7 | 4.7 | 3.5 | 2.7 | 194 | 0.44 | 8 | YES | YES | USB | - | - | - | RJ11 | box | yes | YES | 0.15 | NO | - | ? | 500 ? | usb only stats, dslr control | Lacerta |
|||||
| Skywatcher | Synguider | ICX404AL | bn? | 510 | 492 | 9.6 | 7.5 | 4.9 | 3.7 | 352 | 0.25 | 8? | YES | YES | RS232 | - | - | - | RJ11 | head | yes | YES | 0.25 | NO | - | ? | 266 | 225 | PC conn only for update | Italian
dealer |
||||
| Celestron | NexGuide | ICX404AL | bn? | 510 | 492 | 9.6 | 7.5 | 4.9 | 3.7 | 352 | 0.25 | 8? | YES | YES | RS232 | - | - | - | RJ11 | head | yes | YES | 0.25 | NO | - | ? | 300 ? | PC conn only for
update; =Syn |
Celestron |
|||||
| Orion |
Solitaire | MT9V032 | bn | 752 | 480 | 6 | 6 | 4.5 | 2.9 | 247 | 0.36 | 10 | YES | NO, 250ms |
- | - | - | - | RJ11 | box | yes | YES | 0.1 ? | NO | - | 110 | 569 | = LVI SG | Orion |
|||||
| Plan+auto | MT9V032 | COL | 752 | 480 | 6 | 6 | 4.5 | 2.9 | 247 | 0.36 | 8 | NO | - | USB2 | <0.2 | YES | ? | RJ11 | head | no | NO, usb | <0.2 | NO | np | 124 | 349 | color |
Orion |
||||||
| Autoguider | MT9M001 | bn | 1280 | 1024 | 5.2 | 5.2 | 6.7 | 5.3 | 214 | 1.31 | 41.9 | 8 | NO | - | USB2 | 0.07 | YES | bad | 2 | 3 | RJ11 | head | no | NO, usb | <0.2 | NO | np | 105 | 269 | 160 | noise, hot pix ? | Orion |
||
| Magzero | MZ-5m | MT9M001 | bn | 1280 | 1024 | 5.2 | 5.2 | 6.7 | 5.3 | 214 | 1.31 | 41.9 | 8 | NO | - | USB2 | 0.07 | YES | bad | 2 | 1,2 | RJ11 | head | no | NO, usb | <0.2 | NO | np | 105 | 239 | 160 | noise, hot pix | Magzero |
|
| QHYCCD | QHY5 | MT9M001 | bn | 1280 | 1024 | 5.2 | 5.2 | 6.7 | 5.3 | 214 | 1.31 | 41.9 | 8 | NO | - | USB2 | 0.07 | YES | bad | 2 | 4 | RJ11 | head | no | NO, usb | <0.2 | NO | np | 105 | ? | 210 | noise, hot pix ? | QHY |
|
| Starlight |
Lodestar | ICX429AL | bn | 752 | 580 | 8.2 | 8.4 | 6.2 | 4.9 | 342 | 0.44 | 174.5 | 16 | NO | - | USB2 | 0.2 | YES | very
good |
5 | 1,3 |
JST | head | no | NO, usb | <0.2 | NO | np | 50 | 510 | 350 | little interlacing |
Starlight Xpress |
|
| HX516 | ICX084AL | bn | 660 | 494 | 7.4 | 7.4 | 4.9 | 3.7 | 305 | 0.33 | 83.5 | 16 | NO | - | USB1 | 6 | YES | good | 4 | 1 | - | yes 2 | YES | 0.7 | YES | NO !!! | 200 | - | 320 | very slow 1x1! | WebArchive
of
Starlight
Xpress |
|||
| SXV-H5 | ICX424AL | bn | 660 | 494 | 7.4 | 7.4 | 4.9 | 3.7 | 305 | 0.33 | 83.5 | 16 | NO | - | USB2 | 2 | YES | good | 4 | 1 | RJ11 | head | no | YES | 0.75 | YES | ? | 250 | 990 | WebArchive
of
Starlight
Xpress |
||||
| Atik |
16-IC | ICX424AL | bn | 659 | 494 | 7.4 | 7.4 | 4.9 | 3.7 | 305 | 0.33 | 63.8 | 16 | NO | - | USB1 | 4 | YES | good/ average | 3.5 | 3 | RJ11 | head | no | YES ? | 0.55 | YES | ? | 350 | 470 | ATIK |
|||
| Titan | ICX424AL | bn | 659 | 494 | 7.4 | 7.4 | 4.9 | 3.7 | 305 | 0.33 | 16 | NO | - | USB2 | ? | YES | RJ11 | head | no | YES | 0.55 | YES | ? | 350 | 575 | ATIK |
||||||||
| Fishcamp |
Starfish uncooled | MT9M001 | bn | 1280 | 1024 | 5.2 | 5.2 | 6.7 | 5.3 | 214 | 1.31 | 118.0 | 10 | NO | - | USB2 | <0.2 | YES | average | 3 | 3 | RJ11 | head | no | NO, usb | <0.2 | NO | YES | 11.7 | 310 | 640? | horiz lines | Fishcamp |
|
| Starfish std | MT9M001 | bn | 1280 | 1024 | 5.2 | 5.2 | 6.7 | 5.3 | 214 | 1.31 | 118.0 | 10 | NO | - | USB2 | <0.2 | YES | average | 3 | RJ11 | head | no | YES | ? | YES | YES | 11.7 | 310 | 1000? | usb pwr, no cooling | Fishcamp |
|||
| Meade |
DSI II Pro | ICX429AL | bn | 752 | 580 | 8.3 | 8.6 | 6.2 | 5.0 | 348 | 0.44 | 62.8 | 16 | NO | - | USB2 | ? | YES | average | 3 | 3 | - | no | NO, usb | <0.2 | NO | ? | 280 | 499 | Meade |
||||
| DSI III | ICX285 | COL | 1360 | 1024 | 6.45 | 6.45 | 8.8 | 6.6 | 266 | 1.39 | 139.3 | 16 | NO | - | USB2 | ? | YES | average/ bad | 2.5 | 3 | - | no | NO, usb | <0.2 | NO | ? | 318 | 1159 | color | Meade |
||||
| DSI III Pro | ICX285 | bn | 1360 | 1024 | 6.45 | 6.45 | 8.8 | 6.6 | 266 | 1.39 | 200.5 | 16 | NO | - | USB2 | ? | YES | average | 3 | 3 | - | no | NO, usb | <0.2 | NO | ? | 318 | 1159 | Meade |
|||||
| Opticstar | PL130 | MT9M001 | bn | 1280 | 1024 | 5.2 | 5.2 | 6.7 | 5.3 | 214 | 1.31 | 10.5 | 8 | NO | - | USB2 | <0.2 | YES | very bad | 1 | 3 | - | no | NO, usb | <0.2 | NO | np | 175 | 200? | Opticstar |
||||
| Imaging Source |
DMK21 | ICX098BL | bn | 640 | 480 | 5.6 | 5.6 | 3.6 | 2.7 | 231 | 0.31 | 8 | NO | - | USB2 | <0.2 | YES | ? | - | no | ? | 0.2 | NO | np | 265 | 390 | planetary | Imaging
Source |
||||||
| DMK31 | ICX204AL | bn | 1024 | 768 | 4.65 | 4.65 | 4.8 | 3.6 | 192 | 0.79 | 25.2 | 8 | NO | - | USB2 | <0.2 | YES | bad | 2 | 3 | - | no | ? | 0.2 | NO | np | 265 | 595 | 380 | planetary | Imaging
Source |
|||
| DMK41 | ICX205AL | bn | 1280 | 960 | 4.65 | 4.65 | 6.0 | 4.5 | 192 | 1.23 | 8 | NO | - | USB2 | <0.2 | YES | ? | - | no | ? | 0.2 | NO | np | 265 | 595 | planetary | Imaging
Source |
|||||||
| FLI | ME2 | KAF402ME | bn | 765 | 510 | 9 | 9 | 6.9 | 4.6 | 371 | 0.39 | 156.1 | 16 | NO | - | USB1 | 9 | YES | very good | 5 | 1 | - | yes | YES | 2.2 | YES | YES | 1000 ? | 1500 ? | 500 | FLI |
|||
| Philips | Vesta Pro mod BW |
ICX098AK | bn | 640 | 480 | 5.6 | 5.6 | 3.6 | 2.7 | 231 | 0.31 | 22.1 | 8 | NO | - | USB1 | <0.2 | YES | average | 3 | 1 | - | no | NO, usb | <0.2 | NO | NO | 100 ? | - | 50? | exp< 0.2s |
- |
- [1] if rectangular pixel, then computed from mean dimension
- [2] References:
- 1 author's experience
- 2 from http://www.bloomingstars.com/
or http://www.bloomingstars.com/vega/articles//Astronomy/Reviews/Magzero_MZ-5m_vs_Modified_Vesta_Pro/english/
- 3 from AstroPhotoInsight Oct/Nov 2008, review by Craig Stark; PDF
here
- 4 from http://www.fishcamp.com/starfish_shootout.html
- [3] Merit:
considering
only
star
detection
probability,
higher is better. This formula is a
compromize between the main desirable features. Obtained considered
Pixel count (P), quality (q), bit (b)
M=P*q^2*b - [4] np= "not a problem" because of fast download time
- [5] This is only related to stand
alone cameras, please refer to the above list of characteristics for an
explanation (see pulse time)
- [6] Considering both image defects (lines, hot pixels) and sensitivity
- [7] Not truly stand alone: the calibration must be obtained with a pc connection, and this is permanently saved for all the next nights. But you need not to change guiding optics and/or guiding speed; moreover the object declination is not compensated.
- [8] A timer remote is included,
along with a focuser control of any stepper motor focuser; can be used
with Autostar and Losmandy electronics. Dither guiding is supported.